System - How to build the Open Sonar System
This page will run you through how to put together the sonar and GNSS that make up the Open Sonar System!
Learning objectives:
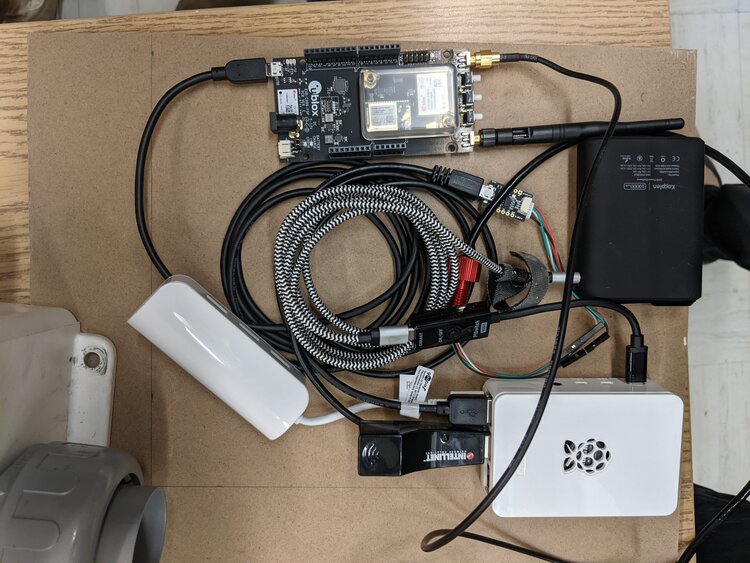
- understand components making up the system
- understand how to operate the system components, at times in tandem
- developmetn skills in using system software
- learn to interpret data as a hydrographer
- learn to export data and apply to other programs
What you will need:
- Blue Robotics Ping Singlebeam Sonar With USB to TTL Converter (link)
- Raspberry Pi 4GB or 8GB (link)
- U-Blox ZED-F9P GNSS receiver or other NMEA capable GNSS receiver (link, or link)
- Long distance Wi-Fi antenna (link)
- Open Sonar Library
- O
- Open Sonar Online
- Open Sonar Processor
Prepare your Pi
Before starting to connect things up, we should take some time to get familiar with the Raspberry Pi, and get it ready for us to use it. We will first need to follow the instructions which come with the Pi to get an operating system installed. We reccomend installing Ubuntu as some Python libraries are more difficut to install in other operating systems such as Raspbian.
Once the operating system is installed we will need to ensure that the following Python libraries are instaled:
- pynmea2 (link)
- bluerobotics-ping (link)
The links behind each of the libraries gives instructions for installation using pip.
Download Open Sonar Software
After ensuring that the above libraries are installed on your pi, follow this link to download the Open Sonar software. Ensure that all of the Open Sonar Library, Open Sonar Configurator, Open Sonar Online, and Open Sonar Processor are downloaded. The files for these softwares must be placed in the working directory where files will be stored from the system when collecting data.